

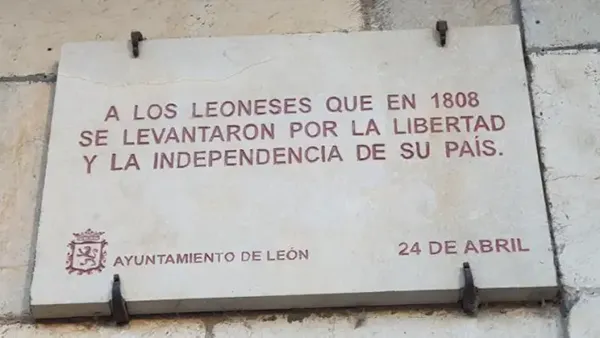
León rinde homenaje a los 'Héroes Leoneses' que en 1808 se sublevaron contra las tropas de Napoleón
RML
León24 de abril de 2025La celebración rememora la gesta que aparece registrada en un acta municipal como primer alzamiento frente al invasor francés.







